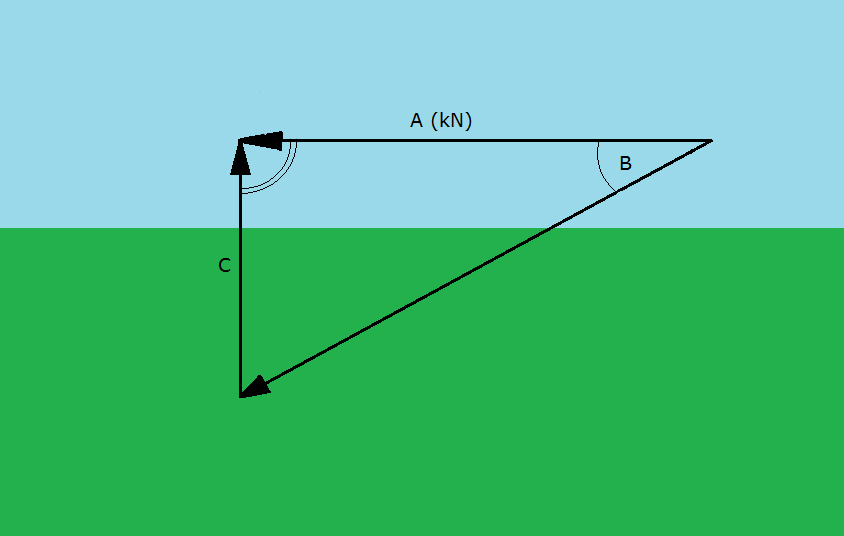
du hast einen gewünschten Vektor A (kN), nämlich den Weg, den das Boot auf dem Wasser zurücklegen soll. Daran zieht das Pferd in einem Winkel B. Um die Abweichung zu kompensieren, also um zu A (kN) zurückzukehren, ist die Korrekturkraft C notwendig: die Kraft, mit der Steuermann gegenhalten muss.
Scheint mir auch so…
Der Steuermann kann doch nur mittels des Ruders „vorhalten“.
Und ein Ruder quer zur Fahrtrichtung?
Nein, die Zeichnung stimmt, ich habe nur die Zugkraft des Pferdes A (kN) an den falschen Vektor gesetzt.
Dargestellt sind ja nur die Kräfte und keine realen Bauteile. Die Frage war ja nicht nach dem erforderlichen Ruderwinkel, sondern nur nach der Kraft, die der Steuermann mittels Rudereinschlags dem schrägen Zug des Pferdes entgegenzusetzen hat.
Scheint mir auch so…
Der Steuermann kann doch nur mittels des Ruders „vorhalten“.
Und ein Ruder quer zur Fahrtrichtung?
Ich finde es trotzdem verkehrt.
Die Steuermannskraft müßte senkrecht zur Seilkraftrichtung stehen und nicht senkrecht zur Fahrtrichtung.
Vom Ruderwinkel habe ich nicht gesprochen.

{kind=link}